动态性是指一个系统能够以不止一种状态与外界发生作用。 一个新的技术系统通常只能用来解决一个特定的问题,只在特定的环境下运行。随着技术系统使用范围的拓展,系统运行状态需要具备随环境和超系统的变化而变化的能力,即系统需要具有动态性。技术系统(或元件)结构的柔性化往往是实现动态化的条件。系统通过元件之间不同的拓扑关系以不同的形态适应性能和环境条件的变化,以及满足功能的多样性需求。
动态性进化法则指出:技术系统的进化应该朝着柔性、可移动性、可控性增加的方向发展,提高技术系统的高度适应性,指导人们以很小的代价,获得高通用性、高适应性、高可控性的技术系统。
(1)结构柔性进化路线:从刚性系统到基于场的系统,系统柔性(状态可变性)提高。
刚体→单铰接→多铰接→柔性体→液态/气态→场连接
例如,人们使用的散热工具的进化(见图13-9):
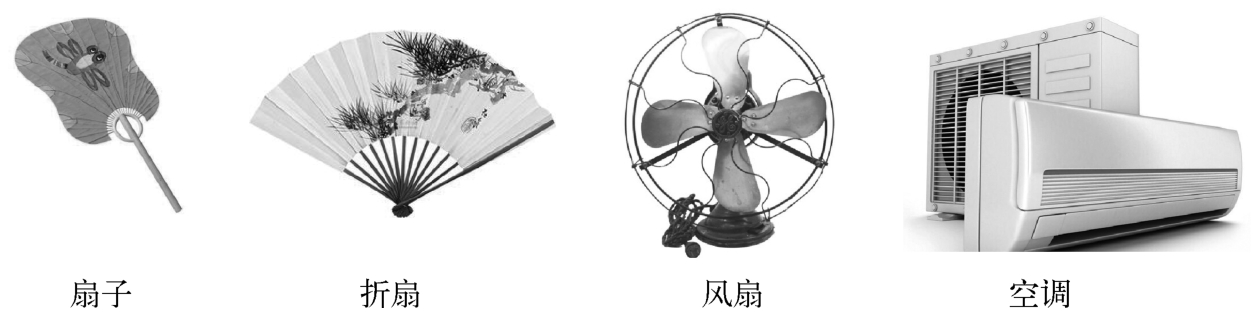
图13-9 散热工具的进化
又如,计算机显示器的进化:
不可移动的显示器→可移动的显示器→有圆铰接的显示器→有两个圆铰接的显示器→有球铰接的显示器→可以分离的显示器
(2)可移动性进化路线。系统的可移动性是指系统执行功能不受时间和地点的限制,体现了系统对超系统的依赖性降低,即系统对超系统变化的适应性增强。
不可动→部分可动→高度可动→整体可动
例如,座椅的进化是这样的:
四腿椅→摇椅→转椅→滚轮椅
图13-10展示了电话机按照该进化路线进化的过程。

图13-10 电话机的可移动性进化路线
(3)可控性进化路线。这条进化路线表明了控制系统进化过程中,控制实施的效率和精度的不断提高。理想状态是自适应控制,即假如工作条件改变,控制系统仍然使受控对象处于最佳工作状态。人参与完成系统功能的程度有降低的趋势,同样,在控制系统中,人的参与程度也有降低的趋势,这是实现系统自动化的基础条件。
不可控制→直接(手动)控制→间接控制(利用中介物,机械)→反馈控制→自动控制(智能反馈)
自动控制系统和各种物理、化学效应的应用提供了自我可控性。反馈装置是技术系统实现自我可控性的一个必要条件。
例如,温室天窗进化的过程:
木棍支撑→按钮控制→温度控制→根据温度自动调节
又如,路灯进化的过程:
分别开闭→总控开闭→自动感应开闭→自动感应开闭并自调节亮度
再如,照相机进化的过程:
手动调焦→按钮调焦→感应光线调焦→自动调焦